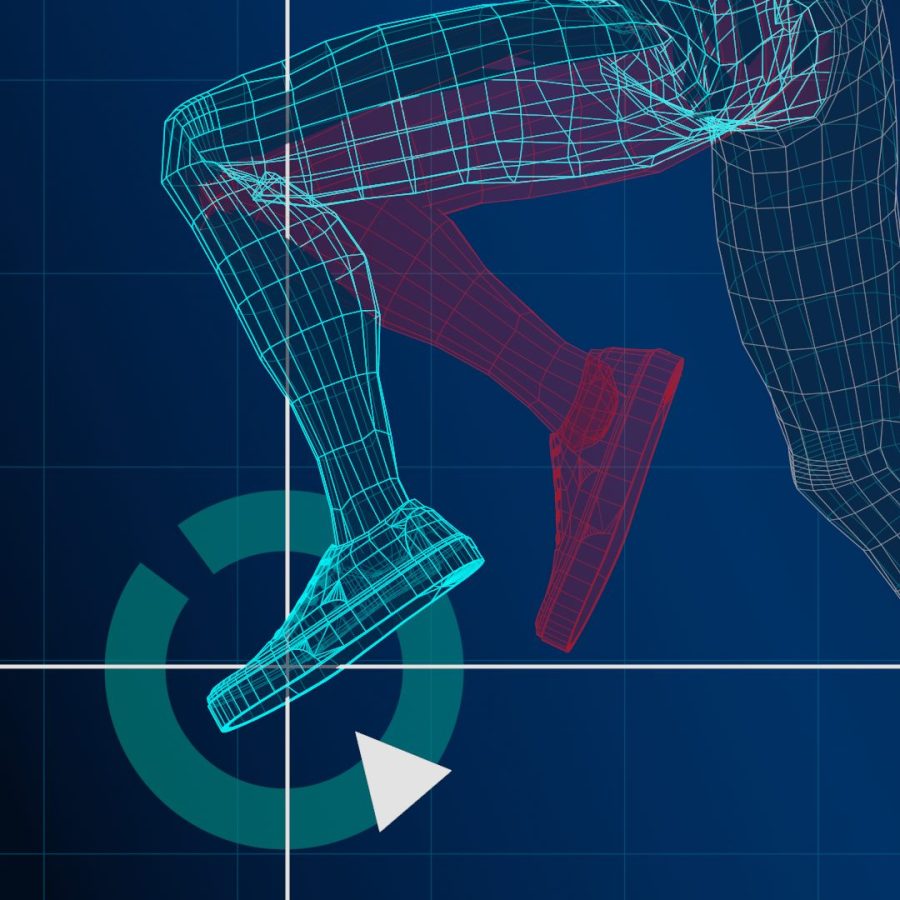
What is the scoop in a Treflip?
It refers to the rotation around the vertical (z) axis.

Skaters have struggled for years to answer this question clearly—not due to a lack of skill, but simply because they did not have the conceptual tools needed to describe the movement accurately.
Instantly discover issues with your tricks and how to fix them.
Deep analyze your motion with the cutting-edge technology.
Track your daily progress and ask questions to others.
Conclusions
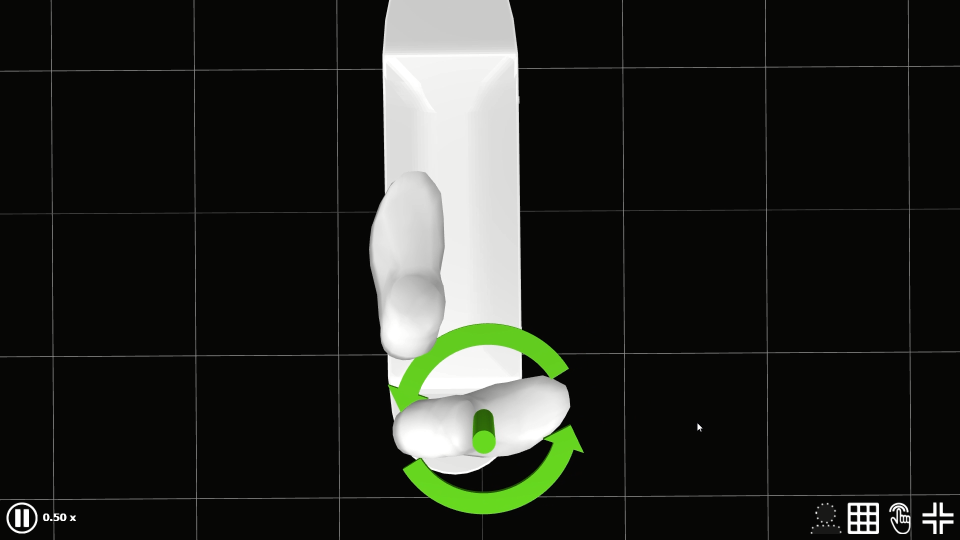
A scoop is essentially a rotation around the vertical axis, which we refer to as the z-axis rotation.
Please avoid thinking of the movement as “swinging” the back foot. Instead, concentrate on inwardly twisting your back foot around the board’s vertical axis.
The scoop simultaneously generates both the 360 pop shove-it rotation and the kickflip rotation.
This inward twisting of the ankle produces both the shove-it and flip components, without requiring any deliberate action from the front foot. The objective reasons behind this will be explained in the following sections.
Simulation


Execution
Let us briefly review the full sequence of the movement from the very beginning.
1. Crouch down as you approach.
Your board may angle slightly toward the heel side at this moment. This is a natural outcome of your foot placement and weight distribution, so there is no need to be concerned.

2. Begin lifting your body upward.
Once you are prepared, start elevating your body. It is crucial, however, not to initiate the scoop yet. As long as your body weight is still pressing down on your legs, they cannot move freely. Wait until your body rises high enough for your legs to move without restriction.

3. Start the scooping motion.
Once your body has elevated sufficiently, you may finally begin the scoop. At this stage, your legs are free to move, allowing you to apply the inward twisting motion required to store energy in the rear truck.

Premises
Summary
To begin, let us revisit the key points introduced in the previous content.
- In Treflips, the front foot does not flip the board as it does in a Kickflip. In fact, when the front foot reaches the position where a flick would normally occur, it is no longer in contact with the deck.
- Instead, a Treflip is largely a rebound-driven trick. By storing and releasing energy through the rear truck, the board flips as the rear truck attempts to return to its neutral position.
- To enable this rebound, the back foot must be used in a way that allows the rear truck to accumulate sufficient energy.
- The front foot does not flick the board. Its primary role is simply to keep the board on the ground while the back foot loads energy into the tail.
In short, the essence of a Treflip is generating the rebound force by applying a proper scooping motion with the back foot.

Analysis
Why does the z-axis rotation matter?
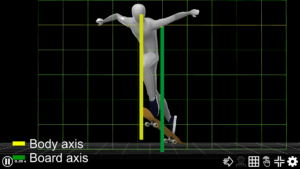
Recall that our goal is to store energy in the rear truck. Put differently, we must bend the hanger of the rear truck while simultaneously initiating rotation of the board.
Typically, during the scoop, your center of gravity is positioned ahead of the board. When you apply force to the tail from this posture, the board naturally begins rotating toward the toe side.

So what is the problem with overflicking?
If you do not direct your focus toward the z-axis rotation, you end up merely lowering the tail and rotating the board without bending the rear truck. As a result, there will not be sufficient stored energy to generate the rebound, causing you to land primo or overshoot to the far side of the deck.
In other words, if you simply swing your back foot toward the heel side, no matter how strong the effort is, it will not flip the board because the rear truck does not gain the energy required for the rebound.

So what should I do instead?
Rather than swinging your back foot outward, focus on creating rotation around the z-axis.
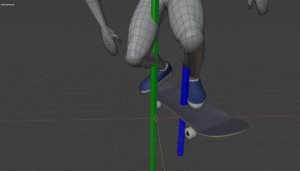
By twisting your back toe inward, you bend the hanger of the rear truck while simultaneously initiating the backside rotation. Once this motion is correctly applied, the remainder of the flip becomes remarkably automatic.
Note
It does not merely feel automatic—it actually becomes automatic.
This is because the motion transforms into a rebound-driven process once sufficient energy has been stored and released.