多くのスケーターは「トレフリップは完全に後ろ足の動きであり、前足はほとんど関係ない」と言います。 しかしその言葉を聞くたびに、私はいつもこう思っていました。「本当にそうなのか?板を回転させるには前足も必要なのではないか?」 「すべては後ろ足だ」と何度も耳にしても、なぜか私たちは前足を使いたくなってしまいます。
この記事では、その言葉が本当に信頼できるのかを検証するために、トレフリップの物理的・客観的なメカニクスを科学的に分析します。
シミュレーション


論理的な分解
なぜ「すべては後ろ足だ」と言われるのか?
前回の記事では、 前足がフリックを生み出す前に板から離れてしまうことを確認しました。また、私のトレフリップはリアトラックのブッシュゴムやテールの反発力を利用していることを説明しました。 すなわち、後ろ足でしゃくる動作を行った際にリアトラックのハンガー押し込められ、そこに弾性エネルギーが蓄えられます。そしてそのエネルギーが解放されるとき、板が回転するのです。つまり、トレフリップとはリアトラックが元の位置に戻る過程として理解できるのです。
なぜトレフリップでデッキが水平になるのか
一見関係がないように見えますが、この点を理解することがトリック全体を理解する鍵になります。 次の点を考えてみましょう。
- オーリーでは、前足でノーズを押し下げることで板が水平になります。
- しかしトレフリップでは、主に後ろ足が動いているにもかかわらず、なぜか板が自然と水平に戻ります。
なぜそうなるのでしょうか?考えれば考えるほど、直感に反する現象のように感じます。

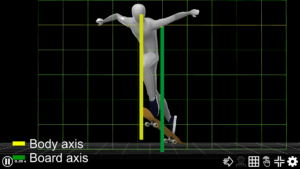
板を水平に保つための要件
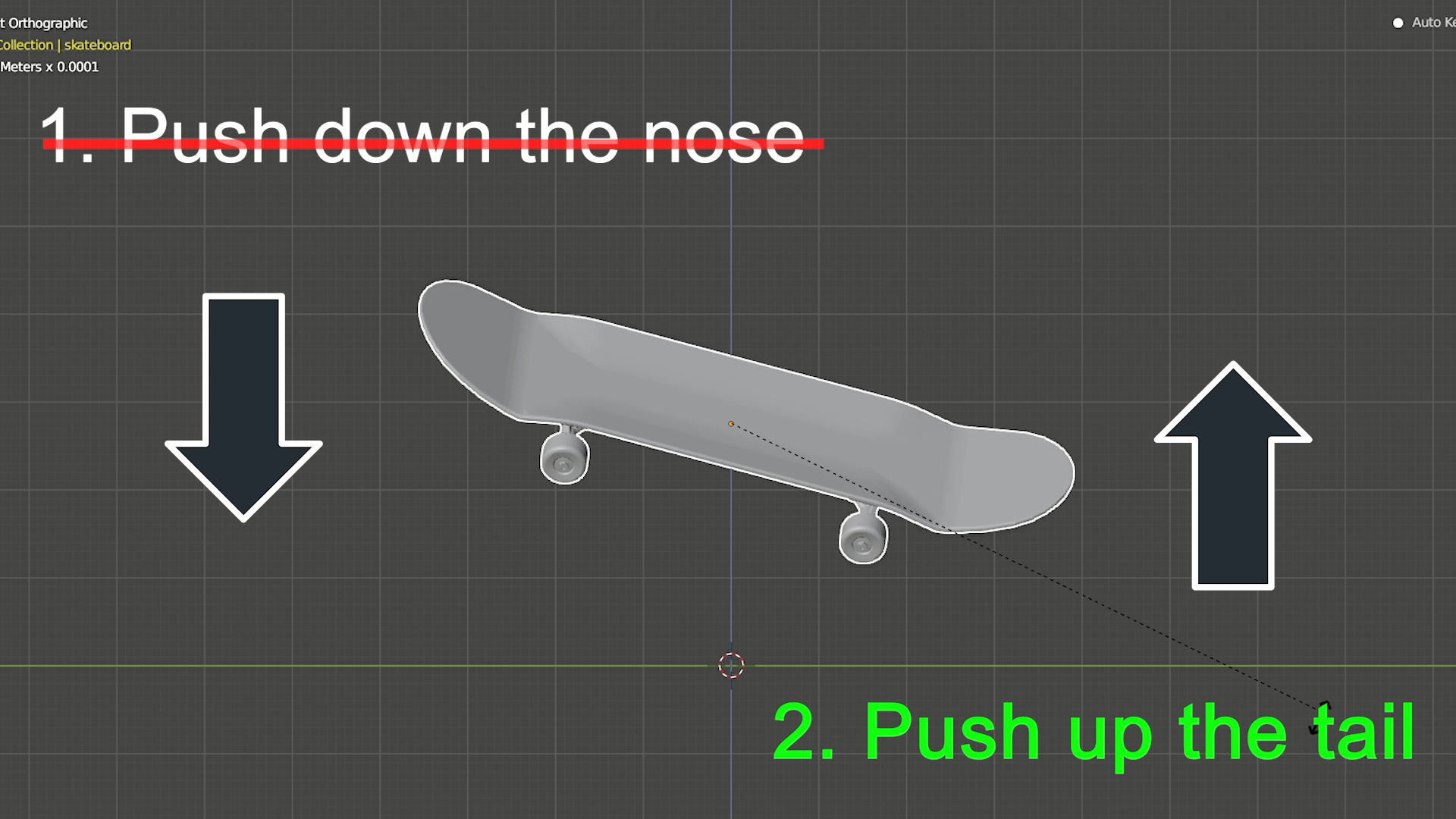
空中で板を水平に保つには、次の2つの方法しかありません。
- オーリーのようにノーズを下に押す
- 何らかの形でテールを持ち上げる
私のトレフリップのスタイルでは、前足は早い段階で板から離れるため、 ノーズを押し下げることはできません。

テールを押し上げる「何か」
残された唯一の可能性は、テールが上方向に押し上げられることです。 つまり、何かがその力を生み出しているはずです。 その「何か」とは、リアトラックに蓄えられた弾性エネルギーです。 このエネルギーが解放されると、次の2つの効果が生じます。
- テール全体が上方向に持ち上げられる。
- 力がテールの一方に偏って作用し板が回転する。
先ほどの問い「なぜトレフリップは水平になるのか?」への答えはこうです。
リアトラックがテールを押し上げることで、板が水平に戻るのです。
この説明は理論的には筋が通っていますが、現時点では私自身の考察に基づく仮説です。 そこで、3Dシミュレーションを通じて物理的に検証してみましょう。
3Dモデルによるシミュレーション
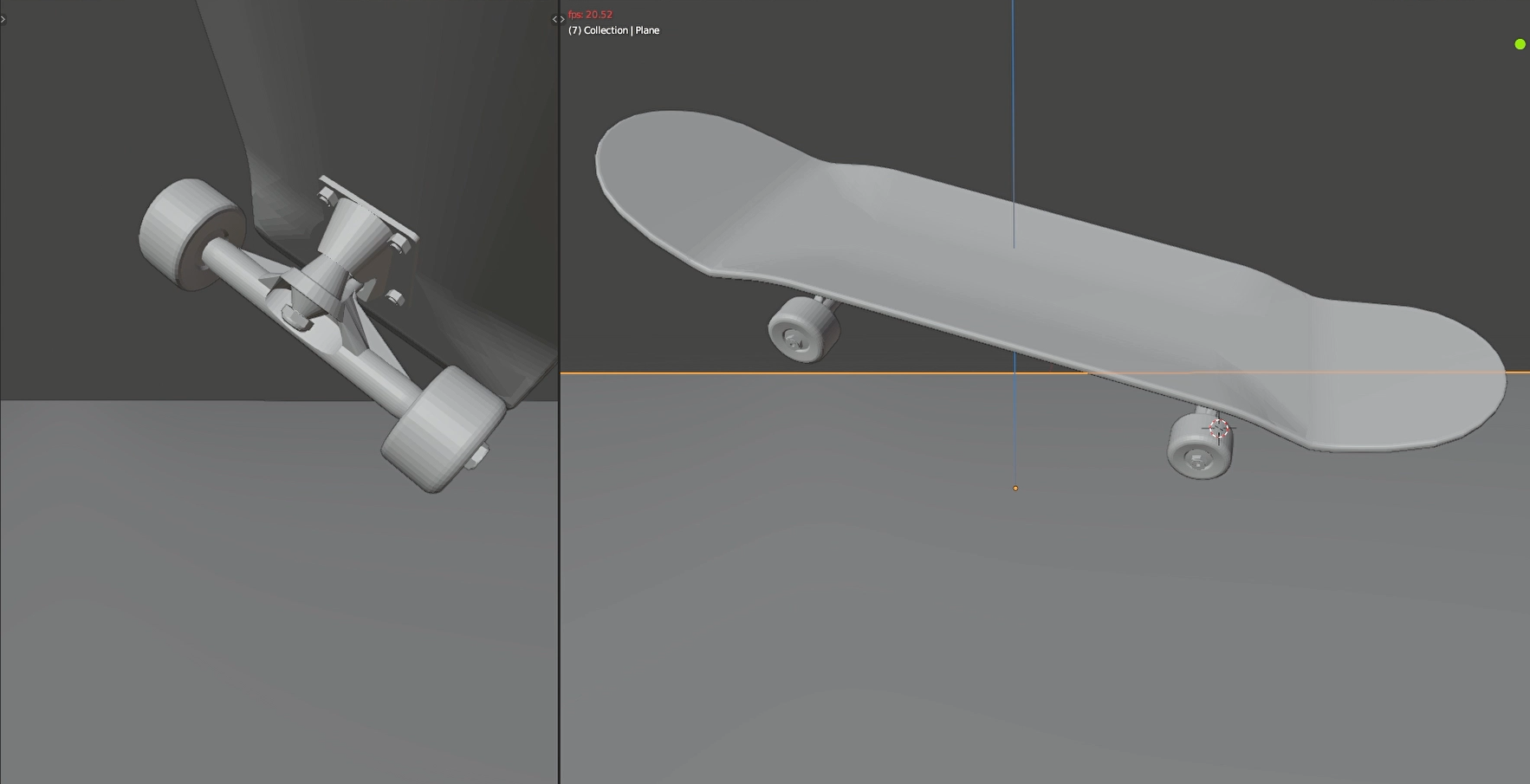
前提
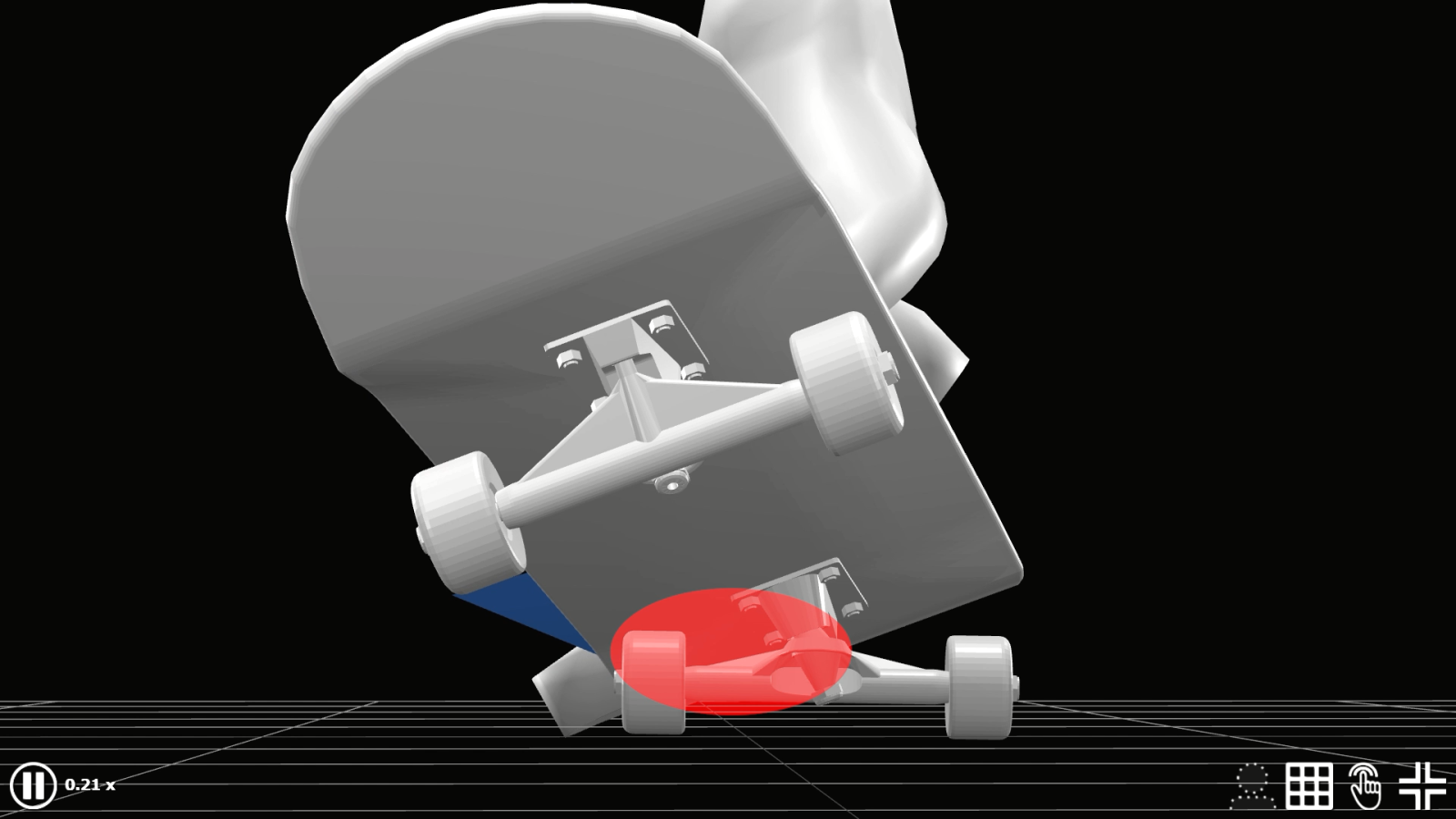
ここで使用するのはリアトラックのハンガーがすでに曲がった状態のスケートボードを3Dモデルです。サイズや重量、重力などの条件は実際のスケートボードとほぼ同一に設定されています。 現在は固定して動かないようにしていますが、リアトラックは常に元の形に戻ろうとする力を持っています。

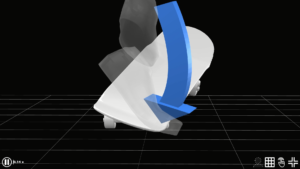
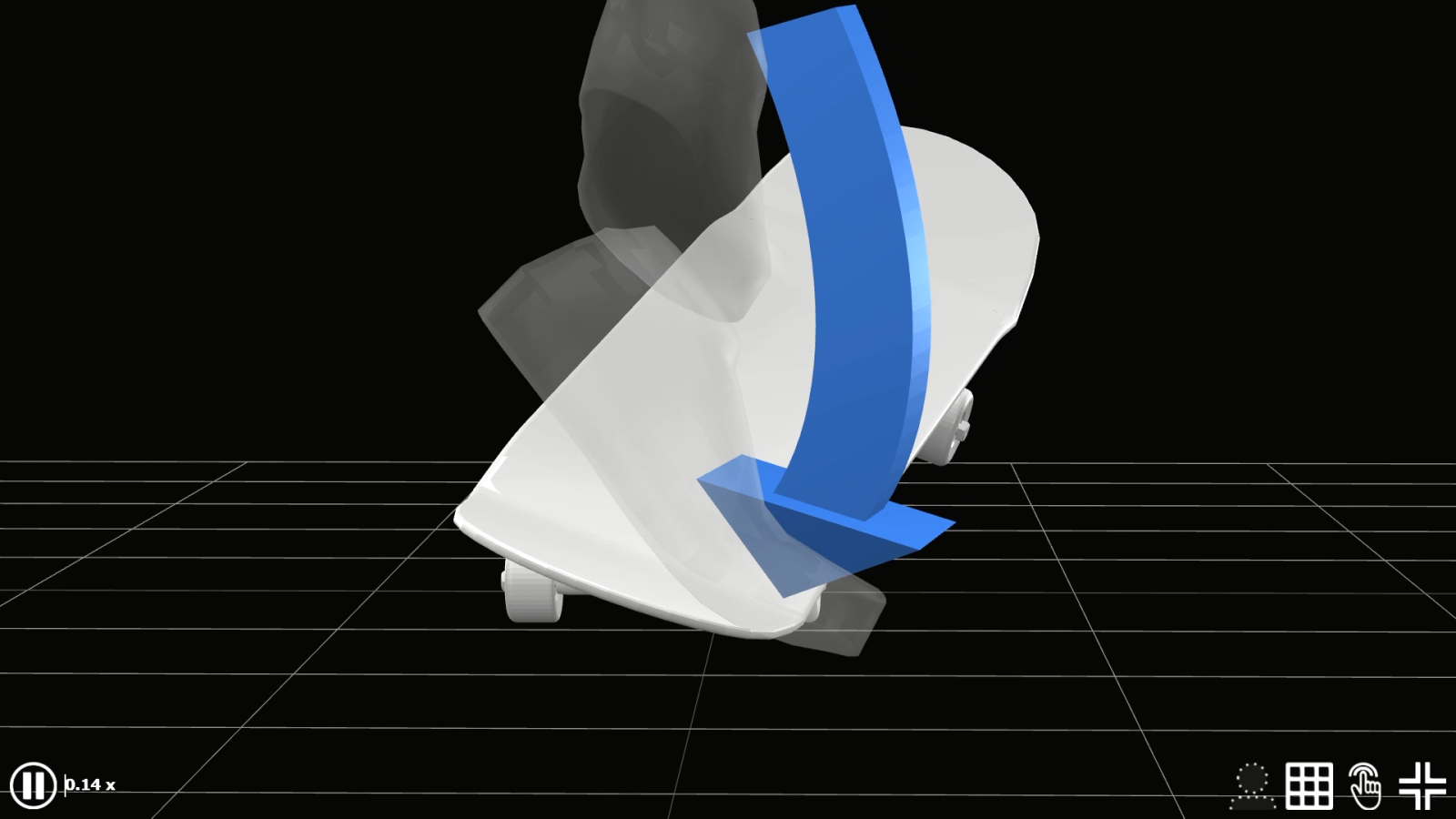
実際に動かしてみる
次の2つの主要な効果が確認できます。
- トラックに蓄えられたエネルギーがテールを上方向に持ち上げる。
- 同時に板が回転する。
足りないもの
この結果は先ほどの仮説と一致していますが、 リアトラックに蓄えられたエネルギーだけでは360度のキックフリップ回転を完了させるには不十分であることがわかります。 板は「プリモ」の状態で着地し、地面に触れた瞬間に回転が止まってしまいます。 実際のトレフリップでは、より長い滞空時間と強い回転力を確保する必要があります。

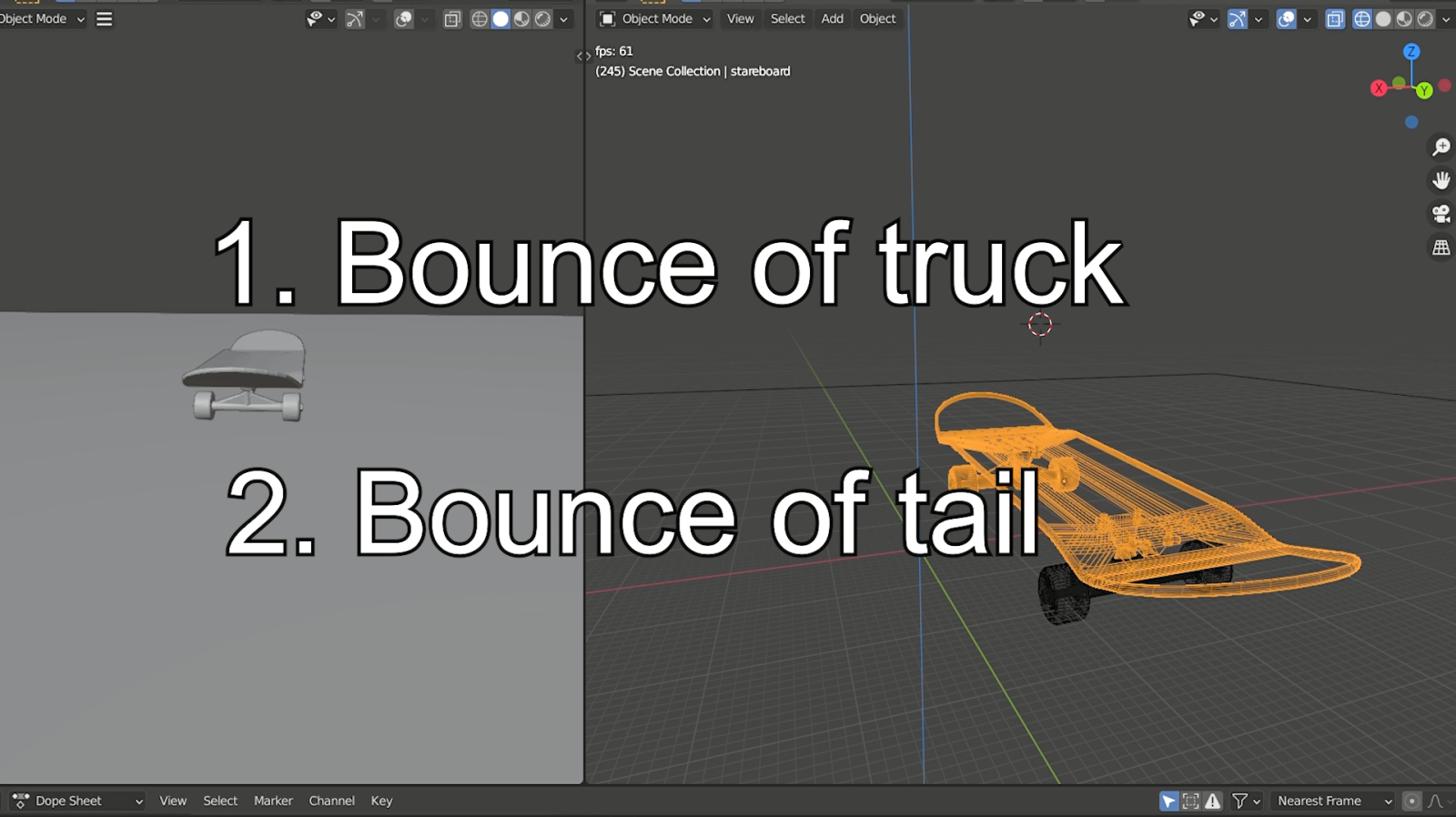
しゃくりの動作の役割
ここでしゃくりの動作の重要性が現れます。 しゃくりの動作を行うとテールが地面に当たり、その反発によって板はより長い滞空時間を確保することができるようになります。 さらに、テールの片側だけが地面に接触するため、 その部分がリアトラックと同じように自らを押し上げ、結果的に回転をさらに加速させるのです。
実践への応用
トレフリップに必要な要素とは?
ここからは、実際の動作について考えていきましょう。 これまでの説明から、トレフリップには次の2つの要素が必要であることが分かります。
- リアトラックが元に戻ろうとする力
- テールが地面から受ける反発
トレフリップに必要なのは、この2つをうまく組み合わせることです。 重要なのは、キックフリップ方向の回転は主にリアトラックが元に戻ろうとする力によって生まれるという点です。 テールが受ける反発力は回転速度を補助するものの、主な役割は板を持ち上げることであり、回転させることではないのです。
なぜ板が逆さまで着地してしまうのか?
強くポップしようとすると、リアトラックの角度が浅くなり、回転を生み出しにくくなることがあります。 横方向へのスピンはスムーズなのに、毎回逆さまで着地してしまう場合、 その原因は単純にポップの力が強すぎる可能性があります。 これを防ぐには、前回の記事で解説した Z軸方向の回転を意識することが重要です。

意識的に「テールを叩こう」と思う必要はありません。 体を持ち上げる動作の中で、反作用によって足が自然と地面を押す力が生まれます。 タイミングが合っていれば、z軸方向の回転に集中するだけで、リアトラックがたわみ、同時にテールが地面を叩く動きが自然に発生します。